
1、TSI系统的意义
大型机组的不断增加和容量不断扩大,甚至出现多座在建和已建千万兆瓦级机组,谈论TSI的意义更加重要。
大容量机组的系统复杂,监控范围大,项目繁多,运行人员的操作和监视必须必须被可靠的安全监视系统代替,减少误操作的可能性。同时,对于汽轮机这种高速旋转的精密机械,任何闪失都将付出惨重代价。一套合格可靠的监视系统,就能够避免误操作和意外的发生,保证汽轮机这一大主机的财产安全。今天讲的TSI系统呼之欲出。
2、TSI系统概述
TSI(Turbine Supervisory Instrument )即汽轮机监测仪表系统,是一种可靠的多通道监测仪表,能连续不断地测量汽轮机-发电机组转子和汽缸的机械运行参数,显示机器的运行状况,提供输出信号给信号仪,并在超过设定的运行极限时发出报警甚至使汽机自动停机。另外,TSI还能提供用于故障诊断的测量信号,配合其他系统进行故障分析等。(本文以上汽NK600-24.2/566/566 型 600MW 超临界中间再热两缸两排汽空冷凝汽式汽轮机为例进行讲解)
3、TSI监测项目
3.1、轴承振动
振动按检测体的相对位置可分为:轴的绝对振动、轴承座的绝对振动、轴和轴承座的相对振动三种。根据振动学原理,由X、Y方向振动合成可得到轴心轨迹。轴在垂直方向与水平方向并没有必然的内在联系,亦即在垂直方向(Y方向)的振动已经很大,而在水平方向(X方向)的振动却可能是正常的,因此,在垂直与水平方向各装一个探头。由于水平中分面对安装的影响,实际上两个探头安装保证相互垂直即可。当传感器端部与转轴表面间隙变化时的传感器输出一交流信号给板件,板件计算出间隙变化(即振动)峰-峰(P-P)值。
在轴振动的测量中已说明了大轴的振动可以传递到轴承壳上,利用速度传感器测量机壳相对于自由空间的运动速度,板件把从传感器来的速度信号进行检波和积分,变成位移值,并计算出相应的峰-峰值位置。
本文汽轮机共有7组振动测点,每组测点包括X向,Y向轴振和相应的瓦振。X向轴振单独方向安装(参与保护)、Y向轴振和瓦振安装在同一个方向构成复合振动也参与保护。振动报警值为125um,跳机值为254um。
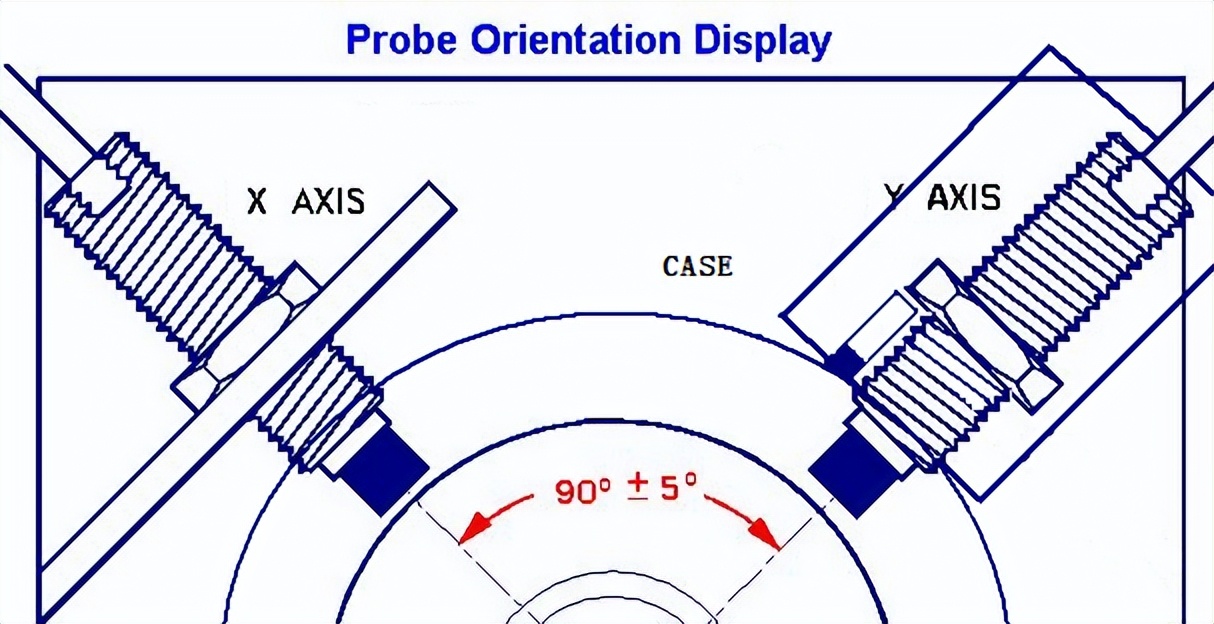
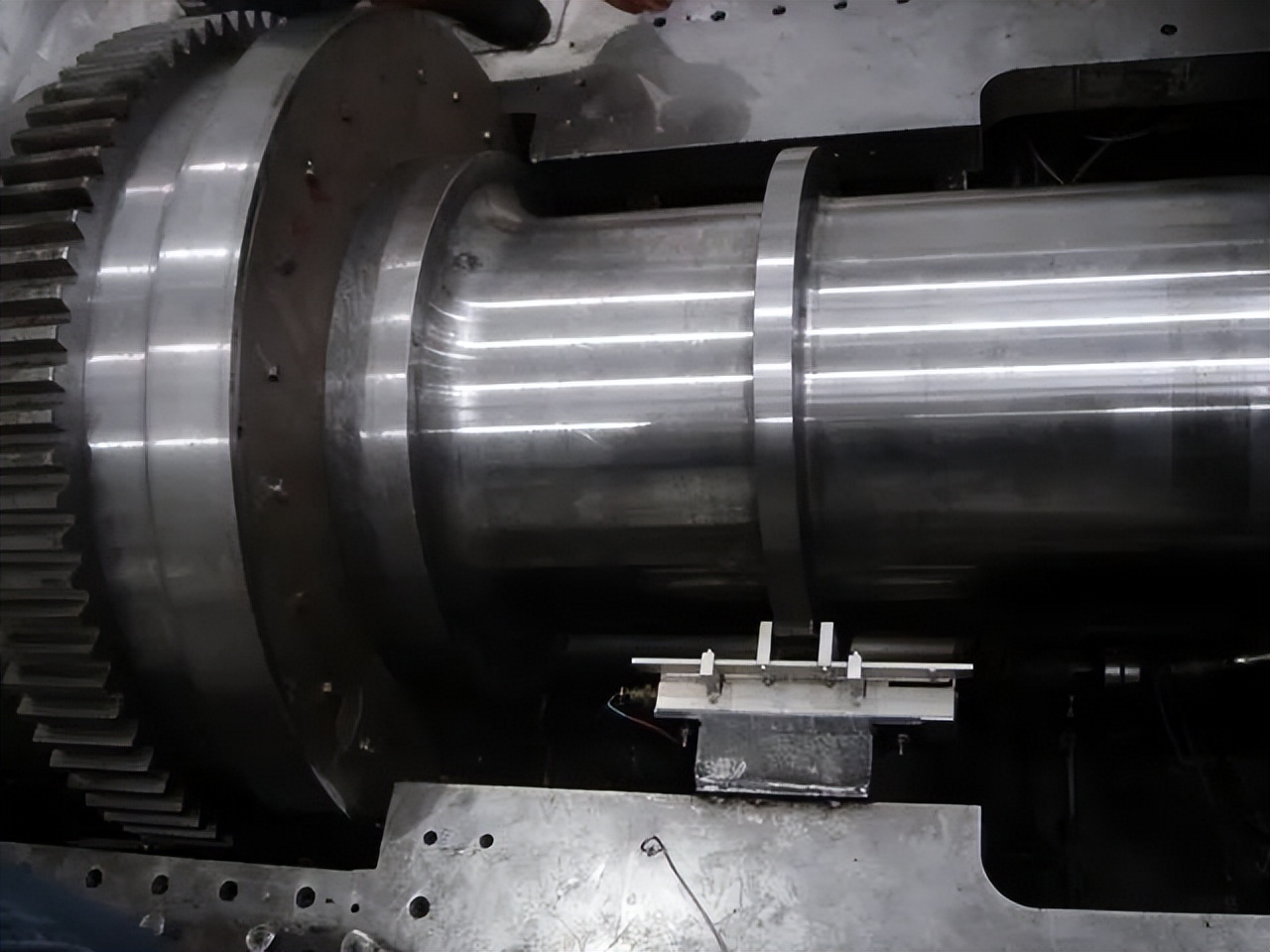
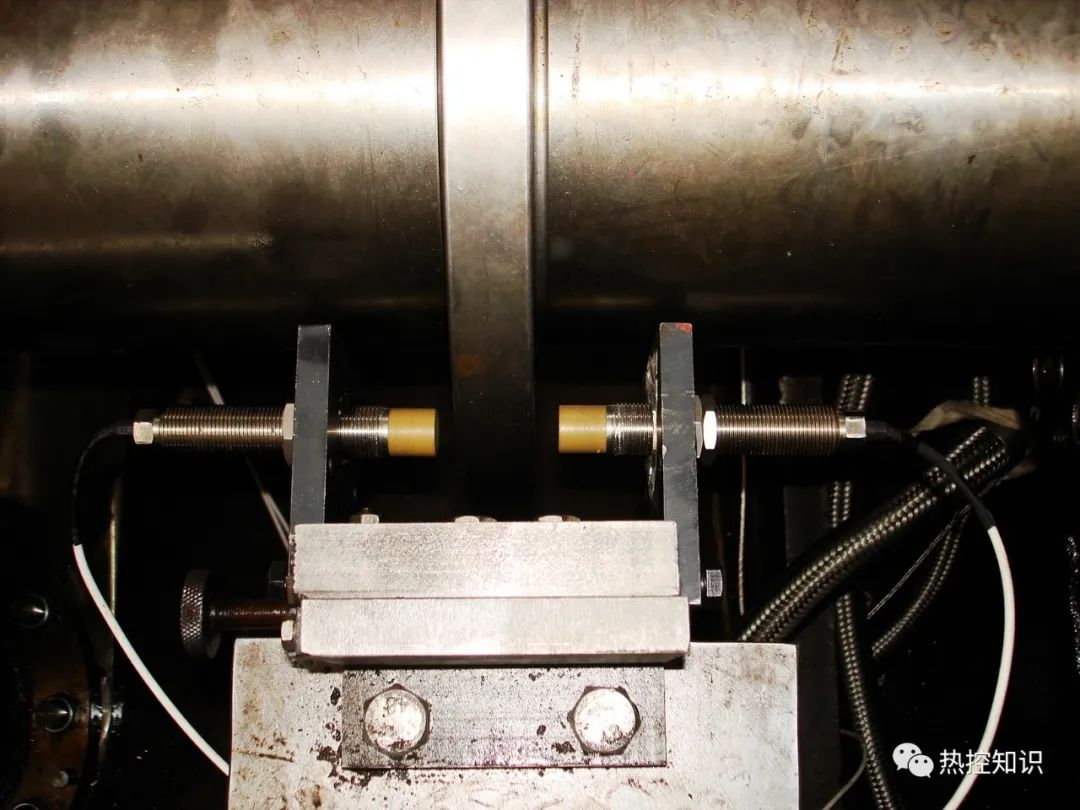
振动安装示意图
3.2、轴向位移
通常采用四个趋近式的探头测量,安装在4瓦处的推力盘处。这四支传感器两个一组,对称于转子安装。每组中的两个传感器是“与”的关系,保证某一通道失效时不会给出错误信号。两组测量传感器的结果是相互独立的,即“或”的关系,以便有效地保护汽轮机组的安全。报警值为±0.9mm,跳机值为±1.0mm。

轴向位移安装图
3.3、高压胀差和低压胀差
胀差也被称为相对膨胀,胀差的监测是为了预防转子和气缸之间可能产生的磨擦。转子膨胀大于汽缸膨胀为正方向,反之为负方向。
胀差探头分为高压胀差和低压胀差,高压胀差有2支探头,相向安装,根据2支探头测出的电压差,经计算得到差胀信号值;低压差胀是一个LVDT型的测量装置,能直接测出电压计算后得到低压差胀信号值。高压胀差报警值为9.5mm,跳机值为10.3mm;低压胀差报警值为15.2mm,跳机值为16mm。
低压胀差安装图
高压胀差安装图
3.4、汽缸绝对膨胀
缸胀也被称为汽缸的绝对膨胀,为了防止由于汽缸受热不均,发生卡涩或动静摩擦事故,必须对缸胀进行监测,确保机组安全。
缸胀的测量:把传感器的铁芯与汽缸连接,当膨胀时,铁芯运动,产生成比例的电信号,输入测量板件进行线性处理,显示输出4~20mA信号。缸胀不参与保护。

缸胀安装图
3.5、偏心和键相
偏心即轴的弯曲,也即轴的径向位置,在转轴没有内部和外部负荷的正常运转情况下,转轴会在油压阻尼作用下,在设计确定的位置浮动,然而一旦机器承受一定的外部或内部的预加负荷,轴承内的轴颈就会出现偏心,其大小是由偏心度峰-峰值来表示,即轴弯曲正方向与负方向的极值之差。
所谓键相器,即在轴上开一个键槽(或加一个凸起键),再用一个普通测振探头对准键。当探头探到键时,前置器输出一脉冲信号,两个脉冲信号之间即为一转。键相信号也可用来指示振动的相位。当知道了测振探头与键相探头的夹角时,就可找出不平衡质量的位置,即转子高点的位置。这对轴的平衡是很重要的。
两个测点垂直安装的是偏心测点,另一个是键相测点。

偏心和键相安装图
3.6、汽轮机转速和零转速
汽轮机在高速旋转中,如果转动力矩和反动力矩出现不平衡,转速就会变化,当转速失控时,就会发生超速损坏零部件,严重时甚至会发生“飞车”的恶性事故。
为了保证安全,必须严格监视汽轮机转速,当转速达到设定值时报警并采取保护措施。当停机中出现零转速时,确保盘车及时投用。
当机器旋转时,齿盘的齿顶和齿底经过探头,探头将周期地改变输出信号,即脉冲信号,板件接收到此脉冲信号进行计数、显示,与设定值比较后,驱动继电器接点输出。转速的测量范围:0~5000rpm;零转速设定值,小于1rpm。

汽轮机转速和零转速安装图
4、TSI监测仪表的组成
TSI监测仪表由传感器、前置器和监视器组成。

4.1、传感器类别、工作原理及型号
本文讲述汽轮机用到电涡流传感器、加速度传感器、线性差动变送器以及磁阻式传感器。
4.1.1、电涡流传感器工作原理
金属导体置于变化的磁场中,导体内就会有感应电流产生,这种电流的流线在金属体内自行闭合,通常称为电涡流。电涡流的产生必然要消耗一部分磁场能量,从而使激励线圈的阻抗发生变化。电涡流式传感器就是基于这种涡流效应制成的。

4.1.2、加速度传感器工作原理
速度传感器适用于测量轴承座、机壳等的振动速度和振动位移(经积分后)。
工作原理如下:刚性固定在被测物体上的传感器壳体上固定有一个永久磁铁,一个惯性质量线圈围绕着磁铁并通过弹簧连在壳体上。测量时,随着被测物振动,磁铁运动,使其产生磁场运动。而线圈因固定在弹簧上,具有较大的惯性质量,即相对高频振动的物体,其是相对静止的。这样,线圈在磁场中作直线运动,产生感应电动势,其大小与线圈运动的线速度(即:机壳的速度)成正比。通过对感应电动势的检测,即能获得被测物体的线速度。
4.1.3、磁阻式传感器工作原理
磁阻传感器是基于磁阻效应工作原理,其核心部分采用一片特殊金属材料,其电阻值随外界磁场的变化而变化,通过外界磁场的变化来测量物体的变化或状况。磁阻传感器具有高精度、高灵敏度、高分辨率、良好稳定性和可靠性、无接触测量及宽温度范围的特点,可进行动态和静态测量。
4.1.4、传感器类别型号
监测项目 | 传感器类别 | 传感器+前置器型号 | 安装数量 |
轴振 | 电涡流传感器 | TQ412+IQS452 | 14 |
轴位移 | 电涡流传感器 | TQ402+IQS452 | 4 |
瓦振(1瓦) | 加速度传感器 | CA202+IPC704 | 1 |
瓦振(2-7瓦) | 加速度传感器 | CE680 | 6 |
偏心 | 电涡流传感器 | TQ402+IQS452 | 1 |
键相 | 电涡流传感器 | TQ402+IQS452 | 1 |
转速 | 磁阻式传感器 | BEF1210 | 5 |
零转速 | 电涡流传感器 | TQ402+IQS452 | 1 |
高压差胀 | 电涡流传感器 | TQ403+IQS453 | 2 |
缸体膨胀 | 电涡流传感器 | AE119 | 1 |
4.2、TSI监视器的组成
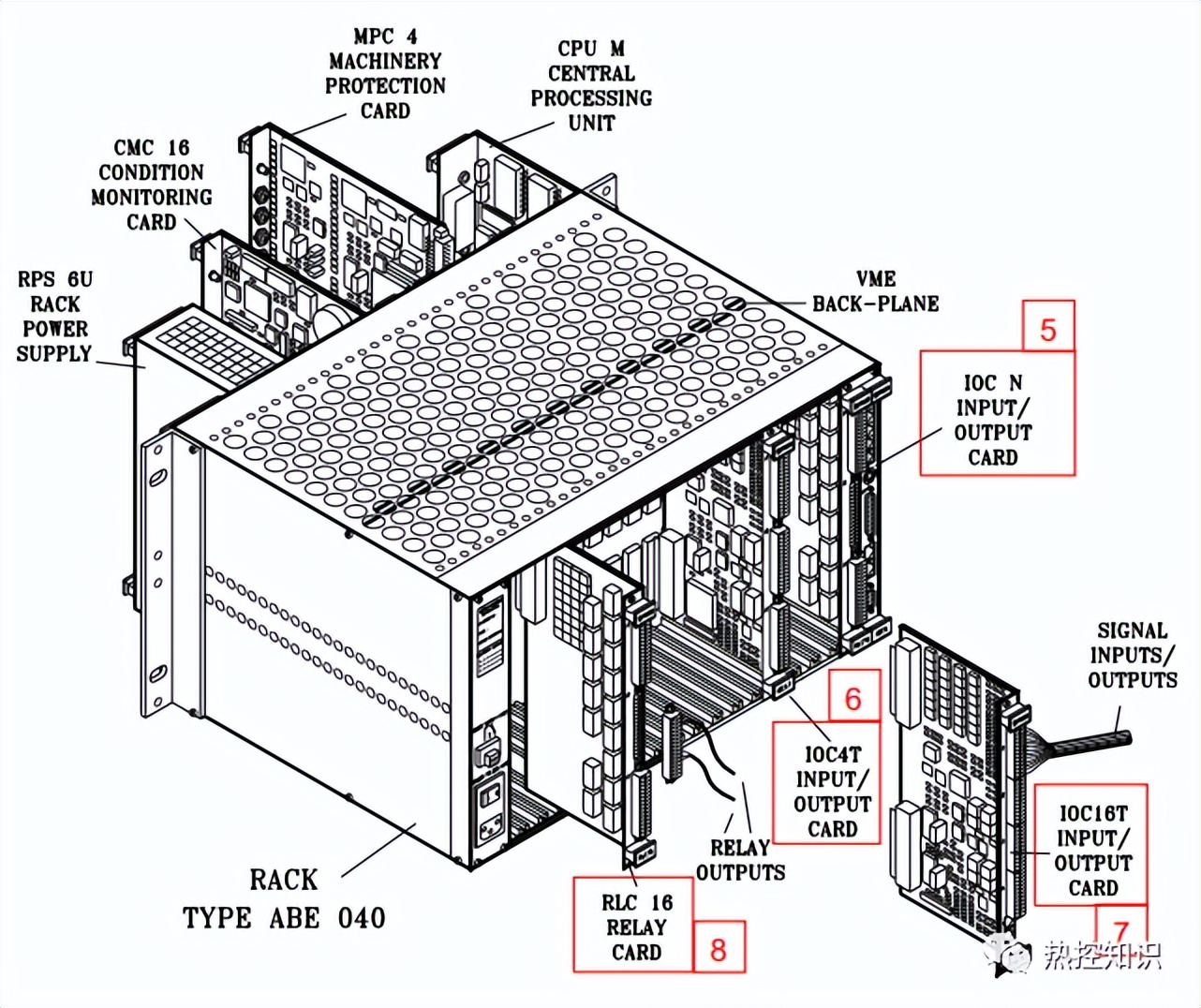
该TSI监视系统采用韦伯瑞华的Vibro-Meter 600系统,该框架包括:
模件名称 | 模件型号 | 模块数 |
CPU模件 | CPU M | 1 |
通讯模件 | MPC4+IOC4T | 9 |
电源模件 | RPS 6U | 2 |
继电器模件 | RLC 16 | 1 |

4.2.1、VM600系统卡件概览
CPU-M:即通讯网关,用于就地显示、组态和通讯。保存全部的系统组态数据,带就地显示 (棒图、数显及工程单位),可以显示每个通道的实时值。提供灵活的通讯连接,RS-232/422/485和以太网,支持TCP/IP和MODBUS等通讯协议,提供与运行VM600 MPS或CMS软件的主计算机进行高速数据连接。切记,不支持热插拔!
MPC4:6通道输入模块(4通道输入+2通道转速/键相),用于机器监测保护。一个模块即可接受所有传感器的输入,包括涡流传感器、加速度传感器、速度传感器、转速探头及其它通用传感器。
CMC16:16通道输入,用于状态监测。前4 个通道可输入键相或其他过程信号,后12个通道可输入其他过程信号。
RPS6U:电源模块。为整个框架提供5V和±12V电源,可选择冗余电源模块。

IOC-N:CPU-M的IO模块,包括网络和通讯。
IOC4T:MPC4的IO模块,包括传感器输入、电流输出、缓冲输出和4支继电器报警输出。报警信号通过总线可输出到RLC16或IRC4。
IOC16T:CMC16的IO模块,包括信号输入输出和通讯连接。
RLC16或IRC4继电器模块:两者均为继电器输出卡,区别在于IRC4为智能继电器输出卡,可以进行逻辑运算。
4.2.2、VM600模件状态灯说明
熄灭: 组态未激活,通道没有运行;
红色闪烁:双通道组合时,达到危险值;
黄色闪烁:双通道组合时,达到报警值;
绿色闪烁:信号超限,或断线;
红色: 通道达到危险值;
黄色: 通道达到报警值;
绿色: 通道正常运行。
4.2.3、VM600拓扑图

《楚心怡顾墨轩白雪萍》小说大结局免费试读 我把男主的白月光拐跑了精选章节
2025-09-16 15:23:36
《糙汉老公求放过》许春华李铁山章节在线试读 糙汉老公求放过第4章
2025-09-16 14:27:25
2025-09-16 10:36:23
2025-09-16 09:14:34
沈书瑶顾世钧小说<他沉寂多年,只因等她开口>全文在线阅读
2025-09-16 05:52:35